Automatizar processos é uma das chaves para melhorar a produtividade, reduzir desperdícios, aumentar a qualidade e tornar qualquer indústria mais flexível e sustentável. Neste artigo, vamos apresentar Estratégias para Automatizar Processos na Indústria, e em processos industriais — desde o planejamento inicial até decisões estratégicas e ferramentas de gestão que podem ser utilizadas.
Seja você estudante, profissional da engenharia ou gestor industrial, este guia vai te ajudar a entender como identificar, planejar e executar melhorias automatizadas em processos produtivos.
Entendendo o Contexto da Automação na Indústria
A automação tem como foco reduzir a intervenção humana nas operações, transferindo tarefas repetitivas, suscetíveis a erro, ou perigosas, para componentes de hardware e software. O objetivo não é apenas produzir mais, mas produzir melhor: com menos falhas, menos desperdício e maior eficiência.
A automação também não se limita à indústria: pode ser aplicada a qualquer processo com sequência de etapas — desde montagem industrial até rotinas administrativas, como contabilidade, coleta, processamento e análise de dados.
Por Onde Começar?
Antes de tudo, é preciso conhecer o processo que se deseja automatizar e fazer um diagnóstico com algumas perguntas:
- Quais são as etapas do processo?
- Em quais etapas ocorrem falhas, atrasos ou desperdícios?
- Quais sensores, atuadores, máquinas, programas e equipamentos estão envolvidos?
- Existem relatórios e dados históricos (dados de produção, manutenção e falhas de processo)?
Com esse diagnóstico, é possível mapear oportunidades de melhoria. Pode ser a substituição de um sensor, a troca de um motor problemático, o ajuste fino parâmetros (de um inversor de frequência, um controlador PID), a substituição por componentes de maior precisão e melhor qualidade ou até mudanças físicas no layout da fábrica.
Avaliação e Planejamento Estratégico da Automação
Após mapear as oportunidades, devemos:
- Avaliar o custo-benefício de cada melhoria, identificando investimentos, possíveis impactos e retornos;
- Verificar disponibilidade tecnológica e de mão de obra qualificada para realização das melhorias e as novas técnicas a serem aplicadas;
- Classificar por impacto (em termos de resultados, mas também de investimentos, custos fixos e variáveis, manutenção, etc.), urgência, investimento e viabilidade;
- Planejar investimentos ao longo do tempo, alinhados ao planejamento estratégico da empresa.
A automação precisa fazer parte do plano de negócios. Seu retorno é real, mas precisa ser estruturado com base em dados, cronogramas e metas concretas.
Estratégias para Automatizar Processos na Indústria: O Princípio USA
Essa abordagem ajuda a direcionar a automação de processos com base em três etapas:
Entender o processo (Understand)
Compreender as etapas, funcionamento, e obter o máximo de informações e detalhes do processo a ser automatizado.
- Diagramas de fluxo do processo;
- Mapeamento das entradas e saídas (sensores e atuadores);
- Cronoanálise;
- Modelagem matemática e simulações;
- Consulta aos operadores e profissionais familiarizados com o processo para compreender detalhes práticos e problemas corriqueiros.
Simplificar (Simplify)
Nesta etapa, deve-se buscar formas de simplificar o processo.
- Eliminar etapas desnecessárias;
- Reduzir movimentações, transportes e manipulações;
- Melhorar ferramentas e ajustar máquinas;
- Procurar novas tecnologias para execução da mesma etapa.
Automatizar (Automate)
Compreendido o processo e identificadas as possíveis simplificações, pode-se avaliar:
- Identificar quais são as atividades repetitivas e previsíveis;
- Automatizar estas atividades com braços robóticos, esteiras, sensores ou softwares (como RPA).
Estratégias para Automatizar Processos na Indústria: As 10 Estratégias de Melhoria de Groover
Baseado no livro do autor Mikell Groover [1], são apresentadas 10 estratégias que ajudam a otimizar processos de manufatura:
- Especialização das operações: Usar equipamentos dedicados para tarefas específicas, melhorando eficiência e qualidade da tarefa;
- Combinação de operações: Fundir etapas do processo para reduzir tempo, espaço e retrabalho;
- Paralelismo de operações: Usar máquinas em paralelo para superar gargalos;
- Integração de operações: Automatizar o transporte entre estações com esteiras ou sistemas robotizados;
- Aumento da flexibilidade: Permitir que a linha produza múltiplos tipos de produtos;
- Melhoria no manuseio e transporte: Reorganizar layout e investir em sistemas de movimentação eficientes;
- Inspeção online: Usar câmeras e sensores para controle de qualidade em tempo real;
- Otimização e controle de processo: Ajuste fino de variáveis, uso de sensores adicionais, simulações, modelos matemáticos e algoritmos de controle modernos;
- Controle das operações: Automatizar a coleta e análise de dados para suporte à decisão, bem como o controle de operações, diagnóstico dos componentes e reconhecimento de alarmes usando, por exemplo, sistemas supervisórios (SCADA) e IHM (Interface Homem-Máquina);
- Manufatura Integrada por Computador (CIM): Integração de sistemas e softwares CAD, CAM, ERP, SCADA e outros softwares e sistemas de gestão, acelerando a troca de informações e a tomada de decisão.
Estratégias para Automatizar Processos na Indústria: Migração da Automação para Novos Produtos
Automatizar um produto novo exige cautela. O investimento em automação só faz sentido quando a demanda justifica. Por isso, é comum dividir a evolução de um processo produtivo em 3 fases:
- Fase 1 – Produção Manual: Estações simples com operadores humanos e baixa automação;
- Fase 2 – Produção Semi-Automatizada: Células automatizadas com operadores ainda responsáveis pelo manuseio, ajustes e inspeção;
- Fase 3 – Produção Automatizada Integrada: Sistemas com esteiras, robôs, controle de qualidade automático e alta integração com os sistemas de gestão.
Estratégias para Automatizar Processos na Indústria: Classificação de Tarefas
Para priorizar o que automatizar, você pode classificar tarefas com base em diferentes critérios, como complexidade e previsibilidade da tarefa. Pode-se traçar um gráfico para classificar as tarefas. As tarefas repetitivas e simples são as principais candidatas à automação.
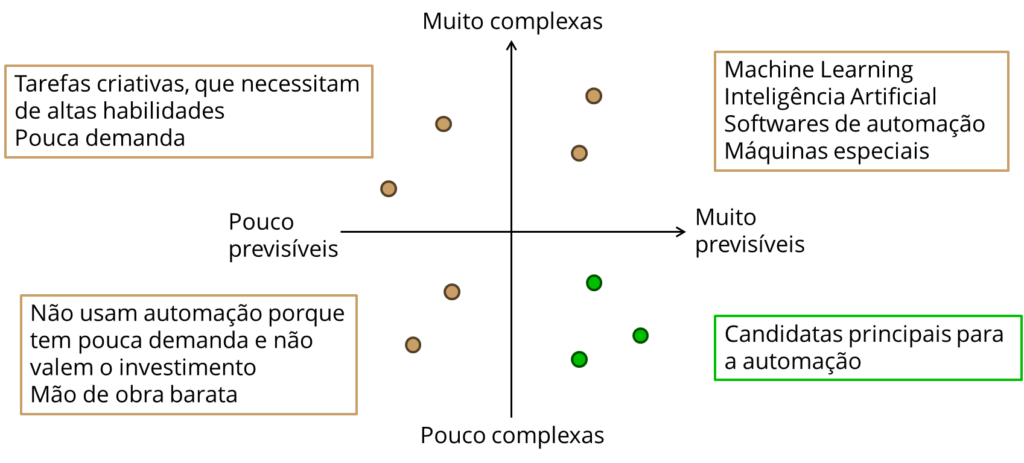
A Tabela apresenta alguns exemplos de tarefas, de acordo com seu nível de complexidade e previsibilidade.
| Complexidade | Previsibilidade | Exemplo | Automação |
|---|---|---|---|
| Alta | Alta | Análise de imagens, controle de qualidade por imagem | IA, Machine Learning, Smart Cameras |
| Baixa | Alta | Encaixe e posicionamento de componentes, movimentos simples e repetitivos | Robôs, máquinas-ferramenta, CLPs |
| Alta | Baixa | Soluções criativas, design e engenharia, melhoria de processo | Não automatizável |
| Baixa | Baixa | Tarefas raras, eventuais e simples, troca de componente danificado na máquina | Não prioritário |
Automação como Estratégia de Negócio
Automação não deve ser um projeto isolado, mas uma estratégia contínua. Deve estar nos planos da empresa, com metas de médio e longo prazo (5 a 10 anos).
Além disso, a empresa deve considerar:
- Investimentos em automação dos processos;
- Conformidade com normas (ex: NR-12, ISO). A automação faz parte de projetos de segurança na NR-12 e pode melhor a conformidade a normas de produção, como normatizações da ISO e ABNT;
- Análise de retorno (ROI) avaliar o retorno sobre os investimentos em automação a serem realizados;
- Sustentabilidade e responsabilidade ambiental avaliar os impactos no uso de recursos (energia, matéria prima, emissão de gases do efeito estufa, etc.).
Ferramentas de Gestão Aplicadas à Automação
A Engenharia de Controle e Automação pode (e deve) usar ferramentas de gestão para apoiar decisões:
SWOT
- Forças: pontos fortes do processo atual;
- Fraquezas: gargalos ou limitações;
- Oportunidades: novas tecnologias, mudanças de mercado;
- Ameaças: riscos externos e concorrência.
Relatório A3
- Estrutura de diagnóstico e solução de problemas em 8 passos (contexto, objetivos, causas, plano de ação, etc.)
Diagrama de Ishikawa (Espinha de Peixe)
- Identificação de causas e efeitos de problemas com base em critérios: métodos, máquinas, pessoas, ambiente, materiais e medições.
Sistema Toyota de Produção (STP)
- Filosofia de melhoria contínua (Kaizen), produção enxuta, just-in-time e respeito às pessoas.
Conclusão
Conhecer diferentes Estratégias para Automatizar Processos na Indústria é um caminho necessário à manter a competitividade e a evolução das demandas e dos negócios — mas exige planejamento, conhecimento técnico e visão estratégica. Ao aplicar os princípios, estratégias e ferramentas apresentadas neste artigo, você estará muito mais preparado para tomar decisões inteligentes e sustentáveis no seu ambiente de trabalho.
Se você gostou deste conteúdo, compartilhe com colegas da área, deixe um comentário ou continue explorando nossos materiais sobre engenharia, manufatura e automação industrial.
Este material foi elaborado com base nas aulas de Estratégias para Aplicação da Automação, apresentadas na disciplina de Sistemas de Manufatura. As aulas também estão disponíveis na playlist Sistemas de Manufatura no meu canal do YouTube.
Cheers, Kikee.